Les Broyeurs à Cône

Sur cette note nous faisons un recapitulatif des principales marques et modèles de broyeurs à cônes utilisés sur le marché français.
Dans le marché du concassage existe une grande variété de marques et modèles de broyeurs giratoires. Chaque constructeur essaie de mettre en avant leurs atouts afin de se faire une place dans ce marché si concurrentiel, mais certains d’entre eux ont réussi à faire de leurs marques une référence et n’ont plus besoin de prouver leur qualité!
1. Le Broyeur à cône HP METSO
Les broyeurs HP sont reconnus comme étant une synthèse des produits Metso. Cet appareil est considéré comme un des plus polyvalents du marché.
La terminologie HP veut dire Haute Performance, et les différents modèles correspondent à la puissance en chevaux (horse power). Soit HP200 = 200 chevaux (160 Kw).
Selon le fabriquant, les broyeurs HP ont une meilleure performance en termes de débit grâce à une augmentation de la vitesse et de l’excentricité.
La tête est tenue sur un arbre en porte à faux et encastrée, en pied, par l’intermédiaire d’un excentrique. La tête et le bol peuvent être extraits du bâti sans démonter l’ensemble mécanique.
Il existe en 6 dimensions : HP100, HP200, HP300, HP400, HP500 et HP800. Standard ou Tête courte, 5 types de chambres sont disponibles pour la plupart des modèles (Extra fin, Fin, Moyen, Gros et Extra Gros).
2. Le Broyeur à cône SYMONS
Mondialement réputé pour la robustesse de sa construction et grande faculté d’adaptation aux applications les plus diverses. Ils sont particulièrement bien adaptés pour traiter les matériaux durs et abrasifs. Cette marque est largement utilisée en Amérique Latine et du Nord.
Il a une protection efficace contre les imbroyables par ressorts, sans influence sur le réglage , des dispositifs hydrauliques de débourrage et un réglage en option.
Ces broyeurs sont équipés de bagues bronze.
Nous trouvons deux types de chambres de broyage :
Les broyeurs Standard (S) qui travaillent généralement en circuit ouvert pour produire des matériaux entre 0/16 et 0/80.
Les broyeurs Tête Courte (TC) ou Short Head en anglais (SH) avec une tête à angle plus aigu et une chambre de concassage plus parallèle qui permet des réductions plus fines, ils sont souvent utilisés en circuit fermé.
Ce broyeur existe en 6 dimensions : 2’, 3’, 4’, 4’1/4, 5’1/2 et 7’.Sur cette note nous faisons un recapitulatif des principales marques et modèles de broyeurs à cônes utilisés sur le marché français.
3. Le Broyeur à cône EUROCONE Sandvik
Les broyeurs Eurocones possèdent un système de filtration à haute finesse (25 microns) pour assurer une plus grande longévité des organes mécanique de l’appareil.
Cet appareil a un choix important de chambres de concassage pour les applications secondaires et tertiaires.
Le montage du manteau se réalise sans résine de scellement.
La protection contre le passage des imbroyables dans la chambre de concassage et le débourrage sont assurés par des vérins hydrauliques de grande course couplés à des accumulateurs.
Il existe en 4 modèles : E-942, E-1152, E-1362 et E-1572, précédemment vendus sous la marque CFBK comme 940, 1150, 1360 et 1570.
3. Les Broyeurs à cône type Hydrocône Type H et S
Les hydrocônes sont utilisés dans le broyage secondaire et tertiaire et leur conception compacte leur permet d’être appropriés aux installations mobiles. Capacité élevée par rapport à leur taille (faible encombrement).
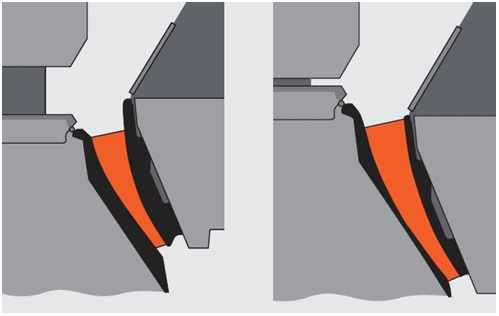
Ils mettent en avant leur Chambre de concassage CLP (constant liner performance) : le profil presque vertical de l’ouverture d’alimentation empêche pratiquement la chambre de se déformer durant toute la durée de vie des pièces d’usure. Ce qui contribue à des coûts d’usure favorables.
Ils sont aussi équipés du Système Hydroset qui est un dispositif de protection et de réglage du serrage comportant un vérin hydraulique puissant qui supporte l’arbre principal et règle sa position.
La Protection automatique contre les surcharges est inhérente au système Hydroset qui permet au cône de concassage de s’abaisser afin de laisser passer les ferrailles et autres imbroyables et de regagner automatiquement sa position d’origine.
L’arbre principal est protégé par un manchon amovible et un écrou interne.
4. Le Broyeur Giratoire Telsmith
Anciennement sous le nom Telsmith on pouvait trouver les broyeurs CFBK gravilleneurs gyrasphère. Cette dernière marque a été rachetée par Metso. De son coté, Telsmith a développé les séries T et SBS, deux séries de broyeurs qui sont vendues essentiellement sur le continent américain.
La série la plus récente, la T, est conçue pour travailler avec des moteurs avec puissances entre 300 et 900 HP. Le réglage en charge et par télécommande se fait avec leur SDA (Système Dynamics Adjust).
Les gravilleneurs gyrasphère, pour leur part, sont des appareils du type giratoire équipés de ressorts de sécurité. Ils étaient fabriqués en deux types : standard (SH) et broyage fin (FCH).
Les CFBK Gyrasphère Gyrasand ont en option hydraulique : le déblocage de la chambre de broyage, le verrouillage et la rotation du support du concave.
5. Le Broyeur Giradysc Bergeaud
Une autre marque qui a été rachetée par la société Metso. Les broyeurs Gyradisc sont des broyeurs à cône spécialement conçus pour le broyage fin.
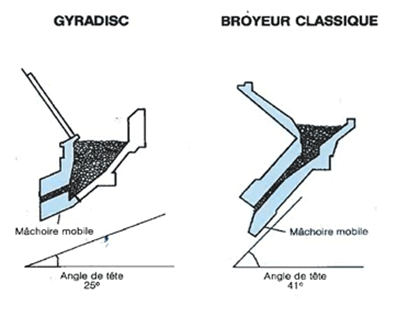
Grâce à une forme et une disposition particulières des mâchoires, ils opérant la fragmentation à la fois par choc et par attrition. Les mâchoires du Gyradisc sont beaucoup plus courtes et moins inclinées que les mâchoires d’un broyeur giratoire classique.
Ils existent deux dimensions de Gyradisc : 36’’ et 48’’
6. Le Broyeur GP Metso
Ce modèle de broyeurs a une conception de type arbre flottant. L’arbre est guidé en tête, dans un étrier, et porté en pied par un vérin. Avec un faible encombrement en hauteur grâce à une conception brevetée.
Le même broyeur peut être utilisé pour une application secondaire, tertiaire ou quaternaire avec le seule changement de la mâchoire.
Option de modification de l’excentricité. L’angle de tête important des broyeurs à cône de la série GP pour les applications de broyage secondaires garantit un fonctionnement sans encombre dans diverses conditions d’alimentation avec un ratio de réduction élevé.
Il existe en 9 modèles: 4 modèles pour le broyage secondaire (GP100S, GP200S, GP300S et GP500S) et 5 modèles pour le broyage tertiaire (GP100, GP11F, GP11M, GP200, GP300 et GP550).
Petit Vocabulaire de Broyage
Mâchoires : pièces d’usure accomplissant le broyage. On distingue 2 mâchoires différentes : une mâchoire mobile et une mâchoire fixe
Ouverture d’alimentation (FO) : distance entre le haut des parties mobiles de broyage. Deux mesures sont possibles ; côté ouvert et côté fermé.
Chambre de broyage (G) : zone à l’intérieur du broyeur où sont broyés les matériaux
Réglage minimum : distance minimale autorisée entre le bas de la mâchoire fixe et le bas de la mâchoire mobile, mesurée là où les parties mobiles sont les plus proches